Driving straight is, and always will be a challenge with these robots. As
a coach, I have beaten it into submission using the PI part of PID. I can
make my robot drive straight for 4-5 feet and only be off ~1/2". That
said, I did not share that solution with my team because... well... it's
FLL... kids to the work. It's quite a bit more involved than a simple
Proportional loop.
My kids did implement a pretty rudimentary proportional control loop that
simply reads the gyro, multiplies it by some kp (which they need to
determine - it's heavily dependent on wheel sizes and robot weight) and
plugs that value into a move steering block. That will get you 90% of what
you need, especially if you stick to lower power levels.
On the subject of Gyro Drift - there is an easy way to cure it. I share
this freely because the problem of gyro drift is so frustrating for so many
teams. Lego should have included a block like this in the EV3 software,
but they didn't.
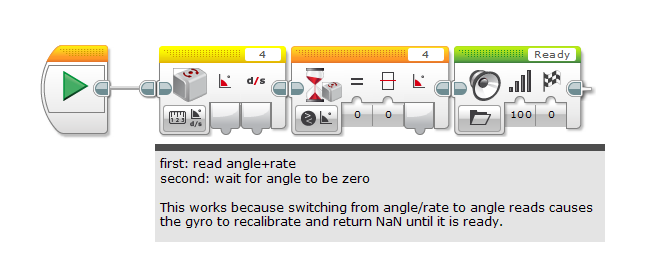
A mostly undocumented feature of the gyro is that when you switch between
Angle+Rate measurement and Angle measurement, it forces the Gyro to
recalibrate. Under the hood, it actually returns NaN (not a number) until
the calibration is complete. If your robot is moved at all while this
calibration is happening, you will get gyro drift. We can exploit this
feature by creating a 'recalibrate' MyBlock that simply reads Angle+Rate,
then waits for 'Angle' to return Zero. As soon as that condition is hit,
you're good to go and should see no drift. Note that this process can take
1-2 seconds, so it's something that you want to do ~once/match. We do ours
during the 1 minute setup.
My team has tested this extensively and it works 100% of the time.
The MyBlock should look like this (ours has a sound at the end so we know
it's done):
[image: Inline image 1]
On Tue, Oct 20, 2015 at 3:23 PM, Cedric D'Costa <[log in to unmask]>
wrote:
> Our kids have experienced that going in a straight line is a challenge.
> The Robot works differently
> based on battery power or some unknown variables. Even the code found
> online using the
> Gyro sensor does not always work. The EV3 will gradually steer to the
> right or left.
> Sometime just the basic Move tank or Move steering works. This has led to
> a level of uncertainty
> during programming.
>
> Has anyone managed to make the EV3 go in a straight line consistently? Our
> success rate has been
> 3 out of 5 on an average using the Gyro so we're not sure how it will
> perform on Competition day.
>
> Thanks,
> Cedric
>
> On Tue, Oct 20, 2015 at 1:48 PM, Frank Levine <[log in to unmask]>
> wrote:
>
>> PID is good when you have non-straight lines, because it will react to
>> the 'D' term as the line starts to turn away. In practice, PID is not easy
>> to program (correctly) in EV3. I have tried. It also requires a level of
>> math that my team has not learned yet. They're in 5th grade now... maybe
>> next year. I do think that PID would be good for straight line driving
>> using the gyro. For almost all normal FLL tasks, just doing 'P' will get
>> you where you need to go.
>>
>> On Tue, Oct 20, 2015 at 1:44 PM, Thomas (Tweeks) Weeks <
>> [log in to unmask]> wrote:
>>
>>> Thanks.. Great resource. :)
>>>
>>>
>>> Still didn't see any pure PID straight line tutorials though.. although
>>> I DID like the "straight line" tutorial and how it used degrees.
>>>
>>> :)
>>>
>>>
>>> Tweeks
>>> ------------------------------
>>> *From:* Todd J Lennox <[log in to unmask]>
>>> *Sent:* Tuesday, October 20, 2015 1:04 PM
>>> *To:* Thomas (Tweeks) Weeks
>>> *Cc:* [log in to unmask]
>>> *Subject:* Re: [VADCFLL-L] Any good EV3 Code Examples for a Straight
>>> Line PID program?
>>>
>>> Try EV3 lessons. They have some really good stuff.
>>>
>>> Sent from my iPhone
>>>
>>> On Oct 20, 2015, at 12:35 PM, Thomas (Tweeks) Weeks <
>>> [log in to unmask] <[log in to unmask]>> wrote:
>>>
>>> I've seen a few videos and sites talking about PID based line following
>>> and balance bot applications.. but our kids just want to see a good example
>>> of straight line PID code (without trying to teach them calculus).
>>>
>>>
>>> I can do this in C, but I'm not savvy enough with the mindstorms GUI
>>> tools to show them how to do it in Lego.
>>>
>>>
>>> Tweeks
>>> ------------------------------
>>> To UNSUBSCRIBE or CHANGE your settings, please visit
>>> https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or
>>> leave the list".
>>> VADCFLL administrative announcements are sent via
>>> VADCFLL-ANNOUNCEMENTS-L. Visit
>>> https://listserv.jmu.edu/archives/vadcfll-announcements-l.html to
>>> subscribe.
>>>
>>> ------------------------------
>>> To UNSUBSCRIBE or CHANGE your settings, please visit
>>> https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or
>>> leave the list".
>>> VADCFLL administrative announcements are sent via
>>> VADCFLL-ANNOUNCEMENTS-L. Visit
>>> https://listserv.jmu.edu/archives/vadcfll-announcements-l.html to
>>> subscribe.
>>>
>>
>> ------------------------------
>> To UNSUBSCRIBE or CHANGE your settings, please visit
>> https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or
>> leave the list".
>> VADCFLL administrative announcements are sent via
>> VADCFLL-ANNOUNCEMENTS-L. Visit
>> https://listserv.jmu.edu/archives/vadcfll-announcements-l.html to
>> subscribe.
>
>
>
-- To UNSUBSCRIBE or CHANGE your settings, please visit https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or leave the list".
-- VADCFLL administrative announcements are sent via VADCFLL-ANNOUNCEMENTS-L. Visit https://listserv.jmu.edu/archives/vadcfll-ANNOUNCEMENTS-l.html to subscribe.
|













{kind=link}