One other fundamental aspect of line following (or edge following), which
is typically not stated, is that the line follower program is always
customized for the robot's starting position relative to the line. If you
start out on the left side of the line, you need to rotate to the right in
the line finding phase as Nari describes below. If you are on the right,
you rotate left. This might seem obvious to you, but you might have to
explain this to the team as they develop their line following
programs. Once you find the line, then there are two ways to program the
line follower depending on the relative color/darkness of the line and
whether you are following the left or right edge.
I have observed teams use PID controllers in robot design judging (mostly
at the World Festival) and in some cases it is overkill. When I am judging
robot design, as most judges will do, for equally performing robots, the
more simple design is considered to be the better one. Also, if your team
is doing advanced programming, it is essential that the team understand
what is programmed into the robot. I have listened to many teams explain
complex programs to me and have been very impressed. For the few times the
team was unable to fully explain their programming, although we give your
teams the benefit of the doubt, it made the judges start wondering who was
really doing the programming.
- We do the work to find solutions with guidance from our coaches and
mentors.
- We know our coaches and mentors don't have all the answers; we learn
together.
- What we discover is more important than what we win.
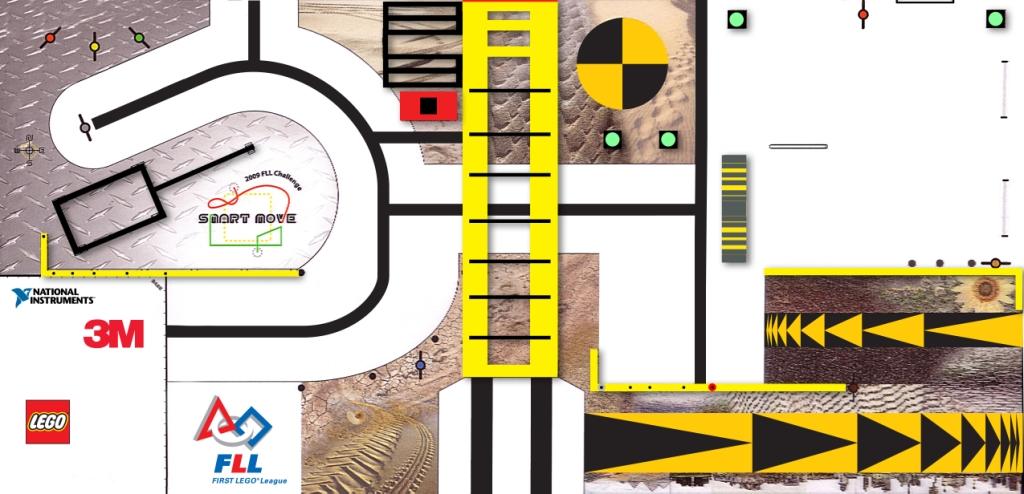
One of the most unique, and incredibly fast, line followers I have seen was
during the Smart Move season. For those that remember, there was a black
line oval which left the base and rotated counter clockwise (see the
attached image). One of the World Festival teams wrote a program which,
once it found the line, it put 100% power to the right (outside) motor and
used line following techniques to adjust the power to the inside motor. It
was incredibly fast. Also, and I cannot remember if the team did this, if
you followed the right edge of the line, your line follower would be thrown
off by the black lines branching to the right, but if you followed the
inside (left) edge, you could line follow all the way to the end without
any other lines interfering with the line following logic. These are a
few examples, where if you have the team think about the problem and figure
out what you want the robot to do, you will likely come up with an
innovative solution which is better than just applying someone else's
canned program the team found on the internet.
Bill
On Tue, Nov 20, 2012 at 1:50 PM, Anant Narayanan <
[log in to unmask]> wrote:
> Paul:
>
>
>
> The essence of line following is a left-right swinging motion with a
> sufficient forward bias. Although called Line-following, most line
> followers are actually edge-followers, typically following either the
> left-edge or the right-edge of a thick black line.
>
>
>
> The best way to teach line following is to first rotate in place
> (classically a 10-notch turn to left or right using a move block) until the
> color/light sensor finds the line. This is a tricky step in which you have
> to play with the mechanical design to find the right amount of ground
> clearance for the sensor to work properly. Sunlight often throws it off,
> as do many illumination systems. This is why Scott Evans, the FLL game
> designer urges everyone to use a light shield to protect the sensor from
> ambient light. This first phase is called Line Finding, and there are
> nuances to using light and color sensors which you will discover from
> practice.
>
>
>
> After you have mastered using a light/color sensor for Line Finding, the
> next step is to start moving forward while still swinging left and right in
> alternating steps. In plain english, this reduces down to:
>
> 1. Swing left, while moving forward until you find (say) the right
> edge of a black line. Classically, this is a 9-notch left turn using move
> blocks, but is popularly implemented as differential motor powers using
> motor blocks.
>
> 2. Swing right, while moving forward until the sensor no longer sees
> black.
>
> Steps 1 and 2 can be repeated ad infinitum to get a basic line follower.
> If the robot gets stuck because the sensor get a spot that is neither
> black not while, I often teach the kids to program in a bias step (swing
> left as in step 1, swing off a fixed amount, repeat).
>
>
>
> This is a simple line follower that can be tested on various shapes (sharp
> turns, smooth turns, hairpins, etc.).
>
>
>
> Next up, from a simple line follower is a proportional line follower, in
> which the left-right swinging motion is matched to the curvature
> (technically to the "error" from the target zone).
>
>
>
> In control systems design, we have three classes of controllers -
> proportional controllers, integral controllers and derivative controllers.
> In proportional controllers, the corrective action is proportional to the
> error (small deviation leads to small correction; large deviation leads to
> large correction). In derivative controllers, the corrective action is
> proportional to the slope of the error curve (is the problem getting worse,
> or better!). In integral controllers, the corrective action is
> proportional to the area under the error curve (this equates to remembering
> that there was an error sometime in the recent past, and one is minimizing
> the area under the error curve). The classical universal controller is
> called a PID controller -- it includes elements of a proportional
> controller, an integral controller and a derivative controller.
>
>
>
> I saw a NXT-based PID controller at the State Championship a couple of
> years ago (a top-tier Div. II team). It has been my dream to teach my
> teams how to build one, just for kicks (it is overkill for FLL). Any year
> now! (if I ever get that far down my to-do list for the following year!).
> You rarely need to get beyond a proportional controller for any FLL
> competition.
>
>
>
> You can find examples of a simple controller and a proportional controller
> at http://www.nxtprograms.com/line_follower/
>
> http://www.nxtprograms.com/line_follower/ . There are downloadable
> programs there as well, that are well documented. As John said, there are
> numerous other resources as well.
>
>
> This same approach also works for a wall-follower.
>
>
>
> I hope this helps, and doesn't intimidate anybody who is not technically
> trained.
>
>
>
> Best of luck,
>
> Nari Narayanan
>
> *------------------------------------------------------------
> Anant S Narayanan
> McLean Robotics Institute
> McLean VA 22102
> 202-421-3826 (cell)
> [log in to unmask]
> -----------------------------------------------------------*
>
> *
> *
>
> On Tue, Nov 20, 2012 at 10:42 AM, John Barrett <[log in to unmask]>wrote:
>
>>
>>
>> Paul,
>> I recommend taking a look at the site that veteran coach Wally Walter put
>> together: http://www.masteringlegorobot.com/using-light-sensors
>>
>> John
>>
>> --
>>
>> John J. Barrett
>> Industrial Medium Software, Inc.
>> 1616 Anderson Road
>> McLean, VA 22102
>>
>> (c) 703-231-5094
>> (p) 703-286-0818
>> (f) 703-286-0888
>>
>> http://www.industrialmedium.com
>>
>>
>>
>> On Nov 20, 2012, at 10:07 AM, Emler, Paul wrote:
>>
>> Dear Fellow FLL Coaches,
>> Now that the Bruin Brick Builder's season is over we are looking to the
>> future. Our team did a good job this year in programming but we always want
>> to learn more. We saw several robots that had a smooth line follow (not the
>> back and forth motion of our line follow) Does anyone have resources
>> available to teach us how to do that? Are there any book or web site
>> suggestions? Thanks for helping a team to improve their approach.
>>
>> Sincerely,
>> Bruin Brick Builders
>> Team #1018
>> ******** Confidentiality Statement: This electronic message and
>> attachments are intended only for the use of the addressee and may contain
>> confidential or privileged information. Receipt of this transmission by any
>> person other than the intended recipient does not constitute permission to
>> examine, copy, or distribute the accompanying material. If you received
>> this electronic message in error, please notify the sender of the message.
>> ********
>>
>> -- To UNSUBSCRIBE or CHANGE your settings, please visit
>> https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or
>> leave the list".
>>
>> -- VADCFLL administrative announcements are sent via
>> VADCFLL-ANNOUNCEMENTS-L. Visit
>> https://listserv.jmu.edu/archives/vadcfll-ANNOUNCEMENTS-l.html to
>> subscribe.
>>
>>
>> ------------------------------
>> To UNSUBSCRIBE or CHANGE your settings, please visit
>> https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or
>> leave the list".
>> VADCFLL administrative announcements are sent via
>> VADCFLL-ANNOUNCEMENTS-L. Visit
>> https://listserv.jmu.edu/archives/vadcfll-announcements-l.html to
>> subscribe.
>
>
> ------------------------------
> To UNSUBSCRIBE or CHANGE your settings, please visit
> https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or
> leave the list".
> VADCFLL administrative announcements are sent via VADCFLL-ANNOUNCEMENTS-L.
> Visit https://listserv.jmu.edu/archives/vadcfll-announcements-l.html to
> subscribe.
-- To UNSUBSCRIBE or CHANGE your settings, please visit https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or leave the list".
-- VADCFLL administrative announcements are sent via VADCFLL-ANNOUNCEMENTS-L. Visit https://listserv.jmu.edu/archives/vadcfll-ANNOUNCEMENTS-l.html to subscribe.
|













{kind=link}