Also, you can do a little experiment here... try moving the robot around
while it's calibrating (between the beeps). It will get dizzy again. If
you run the program again, the drift will be gone. It's pretty rock solid.
On Mon, Nov 10, 2014 at 9:51 PM, Frank Levine <[log in to unmask]>
wrote:
> Naren,
> This is a common problem with the gyro. We got the following solution
> from http://www.droidsrobotics.org, and in turn have contributed some of
> our code to their great site. I encourage other teams to help these guys
> build a useful repository of foundational code, they're doing it the right
> way.
>
> Anyway - here is the code that will cure your gyro woes:
>
>
>
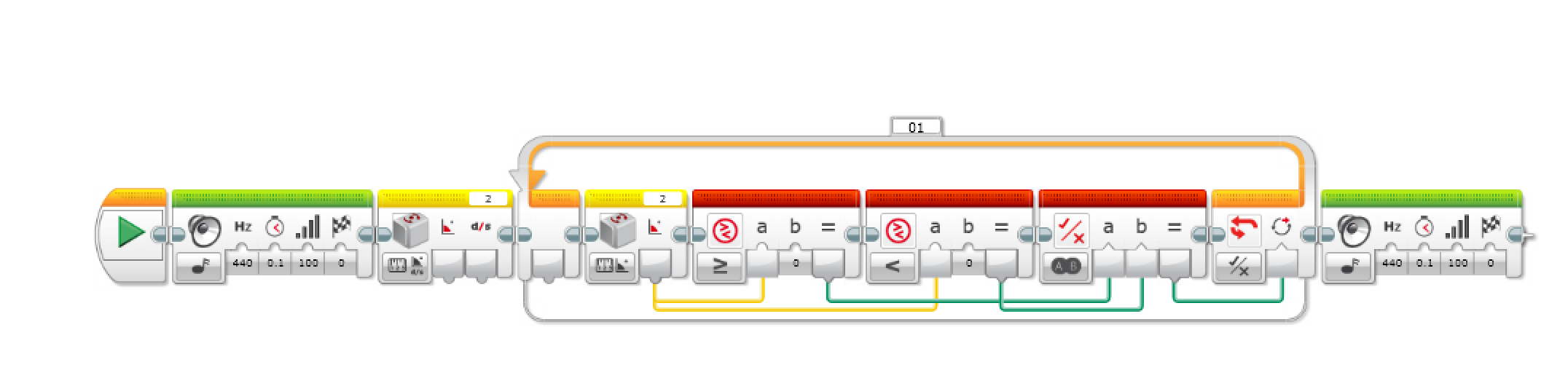
> I'm not sure how well the photo will come through, but here's a brief
> explanation - this all goes into a 'reset gyro' myBlock that you can call
> when you need to reset it.
>
> 1) play a tone to signify the start of calibration
> 2) read the angle and rate
> start a loop
> 3) read the angle only - apparently switching from angle+rate to angle
> mode causes it to go into reset mode
> 4) check to see if the angle is >= 0 OR < 0, more on that in a moment
> end the loop when step 4 evaluates to true
> 5) play a tone to signify that calibration has finished.
>
>
> So, what the heck is going on here? It appears that when you switch from
> reading angles/rates, to just angles, it causes the gyro to reset itself.
> While it is resetting, it will return 'NaN', which stands for 'Not a
> Number'. NaN's have caused me more headaches than I care to admit as a
> professional software engineer... they're hard to detect. The property
> that is being exploited here is that NaN returns 'false' when compared to
> any other number. It's not >, =, or < anything, because it's Not a
> Number. What the loop is doing is just reading the angle from the gyro
> (after it has been put into reset mode) until it starts returning actual
> numbers.
>
> Finally - Once I found this, I tried it out and simply explained it to the
> team. I strongly believe that you don't have to re-invent everything. If
> someone else has published a good solution, then it's perfectly fine to
> understand it and use it. It gave us a great opportunity to discuss how
> computers represent things like NaN (which can happen when you divide a
> number by zero). They all understood it and we have a robot that turns :)
>
> Hope this helps you or anyone else that is suffering from the dizzy robot
> syndrome..
>
> -Frank Levine
> Coach, "The Construction Mavericks"
>
>
>
> On Mon, Nov 10, 2014 at 9:09 PM, Naren Botlaguduru <[log in to unmask]
> > wrote:
>
>> First of all thanks to this community for clarifying lot of questions.
>> Great work.
>>
>> We are using Gyro sensor this year and understand about the Drift.
>>
>> We tried following but still Robot sometimes just spins....
>>
>> 1. Kids are resetting the sensor before every program and also couple of
>> times in the program.
>> 2. Compare is set to equal to rather than Greater than Equal to or Less
>> than equal to as those both options didn't work for us.
>> 3. We are also deducting some drift value to get right angle value.
>> 4. Kids are using a very slow power to do the turns.
>>
>> But still the program that works one day is not working another day due
>> to the Gyro sensor keeps on rotating sometimes. Kids are restarting the
>> Robot when they see that but still not helping.
>>
>> Any tips and tricks to solve this will be a great help. Is there firmware
>> or something that need to be done so that Gyro sensor doesn't give us that
>> drift and gives perfect angle stop.
>>
>> Thanks in advance for any help with Gyro Sensor.
>>
>>
>> --
>>
>> Thx
>> Naren
>>
>>
>>
>> --
>>
>> Thx
>> Naren
>> ------------------------------
>> To UNSUBSCRIBE or CHANGE your settings, please visit
>> https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or
>> leave the list".
>> VADCFLL administrative announcements are sent via
>> VADCFLL-ANNOUNCEMENTS-L. Visit
>> https://listserv.jmu.edu/archives/vadcfll-announcements-l.html to
>> subscribe.
>>
>
>
-- To UNSUBSCRIBE or CHANGE your settings, please visit https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or leave the list".
-- VADCFLL administrative announcements are sent via VADCFLL-ANNOUNCEMENTS-L. Visit https://listserv.jmu.edu/archives/vadcfll-ANNOUNCEMENTS-l.html to subscribe.
|













{kind=link}