My kids did implement a pretty rudimentary proportional control loop that simply reads the gyro, multiplies it by some kp (which they need to determine - it's heavily dependent on wheel sizes and robot weight) and plugs that value into a move steering block. That will get you 90% of what you need, especially if you stick to lower power levels.
On the subject of Gyro Drift - there is an easy way to cure it. I share this freely because the problem of gyro drift is so frustrating for so many teams. Lego should have included a block like this in the EV3 software, but they didn't.
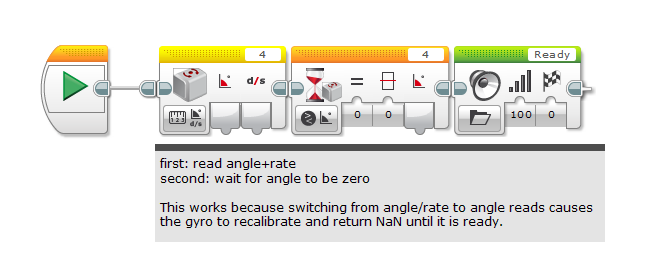
A mostly undocumented feature of the gyro is that when you switch between Angle+Rate measurement and Angle measurement, it forces the Gyro to recalibrate. Under the hood, it actually returns NaN (not a number) until the calibration is complete. If your robot is moved at all while this calibration is happening, you will get gyro drift. We can exploit this feature by creating a 'recalibrate' MyBlock that simply reads Angle+Rate, then waits for 'Angle' to return Zero. As soon as that condition is hit, you're good to go and should see no drift. Note that this process can take 1-2 seconds, so it's something that you want to do ~once/match. We do ours during the 1 minute setup.
My team has tested this extensively and it works 100% of the time.
The MyBlock should look like this (ours has a sound at the end so we know it's done):
On Tue, Oct 20, 2015 at 3:23 PM, Cedric D'Costa <[log in to unmask]> wrote:
Our kids have experienced that going in a straight line is a challenge. The Robot works differentlybased on battery power or some unknown variables. Even the code found online using theGyro sensor does not always work. The EV3 will gradually steer to the right or left.Sometime just the basic Move tank or Move steering works. This has led to a level of uncertaintyduring programming.Has anyone managed to make the EV3 go in a straight line consistently? Our success rate has been3 out of 5 on an average using the Gyro so we're not sure how it will perform on Competition day.Thanks,
CedricOn Tue, Oct 20, 2015 at 1:48 PM, Frank Levine <[log in to unmask]> wrote:PID is good when you have non-straight lines, because it will react to the 'D' term as the line starts to turn away. In practice, PID is not easy to program (correctly) in EV3. I have tried. It also requires a level of math that my team has not learned yet. They're in 5th grade now... maybe next year. I do think that PID would be good for straight line driving using the gyro. For almost all normal FLL tasks, just doing 'P' will get you where you need to go.On Tue, Oct 20, 2015 at 1:44 PM, Thomas (Tweeks) Weeks <[log in to unmask]> wrote:Thanks.. Great resource. :)
Still didn't see any pure PID straight line tutorials though.. although I DID like the "straight line" tutorial and how it used degrees.
:)
Tweeks
From: Todd J Lennox <[log in to unmask]>
Sent: Tuesday, October 20, 2015 1:04 PM
To: Thomas (Tweeks) Weeks
Cc: [log in to unmask]
Subject: Re: [VADCFLL-L] Any good EV3 Code Examples for a Straight Line PID program?Try EV3 lessons. They have some really good stuff.
Sent from my iPhoneI've seen a few videos and sites talking about PID based line following and balance bot applications.. but our kids just want to see a good example of straight line PID code (without trying to teach them calculus).
I can do this in C, but I'm not savvy enough with the mindstorms GUI tools to show them how to do it in Lego.
Tweeks
To UNSUBSCRIBE or CHANGE your settings, please visit https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or leave the list".
VADCFLL administrative announcements are sent via VADCFLL-ANNOUNCEMENTS-L. Visit https://listserv.jmu.edu/archives/vadcfll-announcements-l.html to subscribe.
To UNSUBSCRIBE or CHANGE your settings, please visit https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or leave the list".
VADCFLL administrative announcements are sent via VADCFLL-ANNOUNCEMENTS-L. Visit https://listserv.jmu.edu/archives/vadcfll-announcements-l.html to subscribe.
To UNSUBSCRIBE or CHANGE your settings, please visit https://listserv.jmu.edu/archives/vadcfll-l.html and select "Join or leave the list".
VADCFLL administrative announcements are sent via VADCFLL-ANNOUNCEMENTS-L. Visit https://listserv.jmu.edu/archives/vadcfll-announcements-l.html to subscribe.